INTO-CPS
Co-Simulation using FMI
- Home
- Getting Started
- Modelio Multi-Model Development
- Constituent Model Development
- Co-Simulation
- Test Automation
- Design Space Exploration
![]()
FMI support for Overture
The support for FMI in Overture is based on the Crescendo Tool and an automated export is avaliable when annotating the specification with FMI specific information.
The entry point used by the FMU wrapper is: new World().run() so make sure it is present on export.
- Note that FMUs running VDM require variable step size. If a fixed step size is selected then it may introduce errors. Thus if fixed stepsize is selected make sure that the interval is close to that of the control loop. (Internally VDM runs with nano seconds resolution where each expression is assigned a time cost)*
Overture (VDM) specification can be annotated with interface annotations allowing the modeller to specify which values should be parameters, and which instance variables should be inputs or outputs.
The annotation format is as follows:
-- @ interface: type = [input/output/parameter], name="...";
it must be located exactly above a value or instance variable, and it must be of one of the subclasses of Port from the FMI library.
Installing the FMI Exporter for Overture
Open Overture and follow these steps:
-
- Go to
Help->Install New Software...
- Go to
-
- Click
Add...
- Click
-
- Enter:
- Name:
Overture FMU - Location:
http://overture.au.dk/into-cps/vdm-tool-wrapper/master/latest -
- Click
Ok
- Click
-
- Check
Overture FMU Export
- Check
-
- Click Next / Finish follow the usual stuff to accept and install.
A snapshot build is avaliable from http://overture.au.dk/into-cps/vdm-tool-wrapper/development/latest
Updating / Checking for new versions
-
- Go to `Help->Installation Details
-
- Select
Overture FMU Export
- Select
-
- Click
Update...
- Click
-
- Complete the wizard and restart
Importing a ModelDescription.xml file
-
- Right click on the project and select
Overture FMU->Import Model Description
- Right click on the project and select

-
- Select the model description file
-
- Check the console for errors
If import is done on a clean project, the following files will be created:
System.vdmrtWorld.vdmrtHardwareInterface.vdmrt
If these files already exist in the project, the HardwareInterface.vdmrt will be updated, the import will check for an instance thereof in the system and check for the run operation in World.
Exporting an FMU
-
- Right click on the project and select
Overture FMU->Export FMU
- Right click on the project and select

The export will place a .fmu in the project folder on completion and list the export progress in the console as follows:
---------------------------------------
| FMU Export |
---------------------------------------
Starting FMU export for project: 'watertankController'
Found annotated definition 'HardwareInterface.minlevel' with type 'parameter' and name 'minlevel'
Found annotated definition 'HardwareInterface.maxlevel' with type 'parameter' and name 'maxlevel'
Found annotated definition 'HardwareInterface.level' with type 'input' and name 'level'
Found annotated definition 'HardwareInterface.valveState' with type 'output' and name 'valveState'
Found system class: 'System'
Setting generation data to: 2016-04-26T15:36:08
This is followed by a printout of the modelDescription.xml file it generates.
Annotations
Parameter Annotations
A parameter annotation can only be used with VDM values as shown here:
values
-- Hardware IO parameters aka - Shared Design Parameters
-- @ interface: type = parameter, name="maxlevel1";
public maxlevel1 : RealPort = new RealPort(2.0); -- {m}
The annotation can be used on any value in any class.
Input & Output Annotations
An input or output annotation can only be used on instance variables in the HardwareInterface class as shown here:
system HardwareInterface
-- Hardware IO definitions
instance variables
-- @ interface: type = input, name="level1";
public static upperlevel : RealPort := new RealPort(0.0);
-- @ interface: type = output, name="valveState1";
public static upperValveState : BoolPort := BoolPort(false);
Manual Export
See this page for manual export.
Example
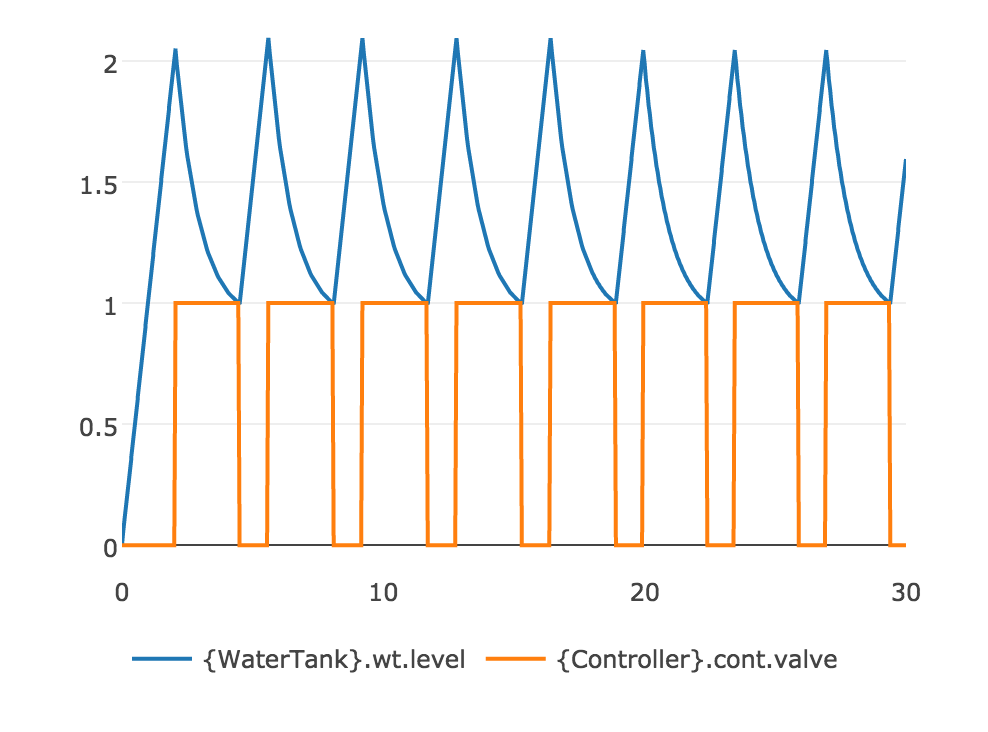
The following example is a WaterTank controller that seeks to keep the water level in the tank between min and max by opening and closing a valve. It has a fixed inflow.
Extract from modelDescription.xml
<ScalarVariable name="minlevel"
valueReference="0"
causality="parameter"
variability="fixed"
initial="exact">
<Real start="1.0" />
</ScalarVariable>
<ScalarVariable name="level"
valueReference="1"
causality="input"
variability="continuous">
<Real start="0.0" />
</ScalarVariable>
<ScalarVariable name="maxlevel"
valueReference="2"
causality="parameter"
variability="fixed"
initial="exact">
<Real start="2.0" />
</ScalarVariable>
<ScalarVariable name="valveState"
valueReference="3"
causality="output"
variability="discrete"
initial="calculated">
<Boolean />
</ScalarVariable>
The HardwareInterface as it will be imported or how it should be written manually. Note that the parameters (VDM values) could have been placed in other classes.
class HardwareInterface
values
-- @ interface: type = parameter, name="minlevel";
public minlevel : RealPort = new RealPort(1.0);
-- @ interface: type = parameter, name="maxlevel";
public maxlevel : RealPort = new RealPort(2.0);
instance variables
-- @ interface: type = input, name="level";
public level : RealPort := new RealPort(0.0);
instance variables
-- @ interface: type = output, name="valveState";
public valveState : BoolPort := new BoolPort(false);
end HardwareInterface
The World class, which is just used to start the model
class World
operations
public run : () ==> ()
run() ==
(start(System`controller);
block();
);
private block : () ==>()
block() ==
skip;
sync
per block => false;
end World
The system has one special instance variable hwi. This is used to auto link the FMI interface to the VDM model.
system System
instance variables
-- Hardware interface variable required by FMU Import/Export
public static hwi: HardwareInterface := new HardwareInterface();
instance variables
public static controller : [Controller] := nil;
cpu1 : CPU := new CPU(<FP>, 20);
operations
public System : () ==> System
System () ==
(
let levelSensor = new LevelSensor(hwi.level),
valveActuator = new ValveActuator(hwi.valveState )
in
controller := new Controller(levelSensor, valveActuator);
cpu1.deploy(controller,"Controller");
);
end System
The LevelSensor class has a port which it operates on.
class LevelSensor
instance variables
port : RealPort;
operations
public LevelSensor: RealPort ==> LevelSensor
LevelSensor(p) == port := p;
public getLevel: () ==> real
getLevel()==return port.getValue();
end LevelSensor
The ValveActuator class has a port it operates on.
class ValveActuator
instance variables
port : BoolPort;
operations
public ValveActuator: BoolPort ==> ValveActuator
ValveActuator(p) == port := p;
public setValve: bool ==> ()
setValve(value)==let - = handle(value) in skip;
end ValveActuator
Finally for completeness the Controller.
class Controller
instance variables
levelSensor : LevelSensor;
valveActuator : ValveActuator;
operations
public Controller : LevelSensor * ValveActuator ==> Controller
Controller(l,v)==
(levelSensor := l;
valveActuator := v;
);
values
open : bool = true;
close: bool = false;
operations
private loop : () ==>()
loop()==
cycles(2)
(
let level : real = levelSensor.getLevel()
in
(
if( level >= HardwareInterface`maxlevel.getValue())
then valveActuator.setValve(open);
if( level <= HardwareInterface`minlevel.getValue())
then valveActuator.setValve(close);
);
);
thread
periodic(10E6,0,0,0)(loop);
end Controller
Simulating this model from 0 to 30.0 with a variable step size algorithm should show similar to this:
FMI 2.0 Library for VDM
The FMI interface is modelled as a collection of VDM classes all deriving from the Port class:
/******************************************************************************************************************************
* FMI 2.0 interface for VDM
*
* The Port class is the base class for all ports. The following ports exists:
* - IntPort
* - BoolPort
* - RealPort
* - StringPort
* These concreate ports must be used in the HardwareInterface class. All of them must contain a private 'value' field
* this field is accessed directly by the build-in FMI support in the simulator. The ports can be given as arguments to
* other model elements. All access to the internal value must be done through set/getValue since this call insured that the
* simulator knows that the value have been read or written to and requires a co-simulation step for synchronization.
*
* A port can be instantiated with a value or with no values to use the library default value.
*
******************************************************************************************************************************/
class Port
types
public String = seq of char;
public FmiPortType = bool | real | int | String;
operations
public setValue : FmiPortType ==> ()
setValue(v) == is subclass responsibility;
public getValue : () ==> FmiPortType
getValue() == is subclass responsibility;
public static create: FmiPortType ==> IntPort | BoolPort | RealPort | StringPort
create(v) ==
if is_(v, String) then
return new StringPort(v)
elseif is_(v,bool) then
return new BoolPort(v)
elseif is_(v,int) then
return new IntPort(v)
else
return new RealPort(v)
end Port
class IntPort is subclass of Port
instance variables
value: int:=0;
operations
public IntPort: int ==> IntPort
IntPort(v)==setValue(v);
public setValue : int ==> ()
setValue(v) ==value :=v;
public getValue : () ==> int
getValue() == return value;
end IntPort
class BoolPort is subclass of Port
instance variables
value: bool:=false;
operations
public BoolPort: bool ==> BoolPort
BoolPort(v)==setValue(v);
public setValue : bool ==> ()
setValue(v) ==value :=v;
public getValue : () ==> bool
getValue() == return value;
end BoolPort
class RealPort is subclass of Port
instance variables
value: real:=0.0;
operations
public RealPort: real ==> RealPort
RealPort(v)==setValue(v);
public setValue : real ==> ()
setValue(v) ==value :=v;
public getValue : () ==> real
getValue() == return value;
end RealPort
class StringPort is subclass of Port
instance variables
value: String:="";
operations
public StringPort: String ==> StringPort
StringPort(v)==setValue(v);
public setValue : String ==> ()
setValue(v) ==value :=v;
public getValue : () ==> String
getValue() == return value;
end StringPort