Incubator Digital Twin with NuRV FMU Monitoring Service
Overview
This example demonstrates how an FMU can be used as a runtime monitoring service (in this example NuRV[1]) and connected with the Incubator digital twin to verify runtime behaviour of the Incubator.
Simulated scenario
This example simulates a scenario where the lid of the Incubator is removed and later put back on. The Incubator is equipped with anomaly detection capabilities, which can detect anomalous behaviour (i.e. the removal of the lid). When an anomaly is detected, the Incubator triggers an energy saving mode where the heater is turned off.
From a monitoring perspective, the aim is to verify that within 3 messages of an anomaly detection, the energy saving mode is turned on. To verify this behaviour, the following property is constructed:
.
The monitor will output the unknown state as long as the property is satisfied and will transition to the false state once a violation is detected.
The simulated scenario progresses as follows:
- Initialization: The services are initialized and the Kalman filter in the Incubator is given 2 minutes to stabilize. Sometimes, the anomaly detection algorithm will detect an anomaly at startup even though the lid is still on. It will disappear after approx 15 seconds.
- After 2 minutes: The lid is lifted and an anomaly is detected. The energy saver is turned on shortly after.
- After another 30 seconds: The energy saver is manually disabled producing a false verdict.
- After another 30 seconds: The lid is put back on and the anomaly detection is given time to detect that the lid is back on. The monitor is then reset producing an Unknown verdict again. The simulation then ends.
Example structure
A diagram depicting the logical software structure of the example can be seen below.
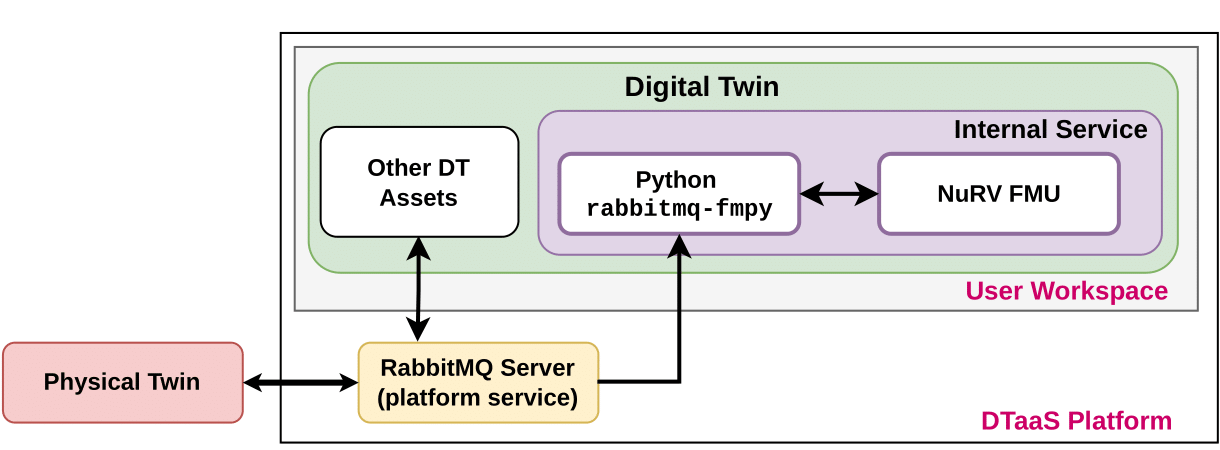
The execute script is responsible for starting the NuRV service and running the Python script that controls the scenario (execute.py).
The execute.py script starts the Incubator services and runs the example scenario. Once the Incubator DT is started, a RabbitMQ client is created that subscribes to changes in the anomaly and energy_saving states of the DT, as well as the verdicts produced by the NuRV service. Each time an update is received, the full state and verdict is printed to the console.
Digital Twin Configuration
Before running the example, the simulation.conf file should be configured with the appropriate RabbitMQ credentials.
The example uses the following assets:
| Asset Type | Names of Assets | Visibility | Reuse in other Examples |
|---|---|---|---|
| Tools | common/tool/NuRV/NuRV | Common | Yes |
| Other | common/fmi2_headers | Common | Yes |
| DT | common/digital_twins/incubator | Common | Yes |
| Specification | safe-operation.smv | Private | No |
| Script | execute.py | Private | No |
The safe-operation.smv file contains the default monitored specification as described in the Simulated scenario section. These can be configured as desired.
Lifecycle phases
The lifecycle phases for this example include:
| Lifecycle phase | Completed tasks |
|---|---|
| create | Downloads the necessary tools and creates a virtual python environment with the necessary dependencies |
| execute | Runs a python script that starts up the necessary services as well as the Incubator simulation. Various status messages are printed to the console, including the monitored system states and monitor verdict. |
If required, change the execute permissions of lifecycle scripts that need to be executed. This can be done using the following command.
where {script} is the name of the script, e.g. create, execute etc.
Running the example
To run the example, first run the following command in a terminal:
Then, first execute the create script followed by the execute script using the following command:
The execute script will then start outputting system states and the monitor verdict approx every 3 seconds. The output is printed as follows.
"State: {anomaly state} & {energy_saving state}"
where "anomaly" indicates that an anomaly is detected and "!anomaly" indicates that an anomaly is not currently detected. The same format is used for the energy_saving state. NuRV verdicts are printed as follows
"Verdict from NuRV: {verdict}".
The monitor verdict can be false or unknown, where the latter indicates that the monitor does not yet have sufficient information to determine the satisfaction of the property. The monitor will never produce a true verdict as the entire trace must be verified to ensure satisfaction due to the G operator. Thus the unknown state can be viewed as a tentative true verdict.
An example output trace is provided below:
References
- Information on the NuRV monitor can be found on FBK website.