Water Tank Model Swap
Overview
This example demonstrates multi-stage execution and dynamic reconfiguration of a digital twin (DT). Two features of DTs are demonstrated:
- Fault injection into live DT
- Dynamic auto-reconfiguration of live DT
The co-simulation methodology is used to construct this DT.
Example Structure
Configuration of assets
This example uses four models and one tool. The specific assets used are:
| Asset Type | Names of Assets | Visibility | Reuse in Other Examples |
|---|---|---|---|
| Models | Watertankcontroller-c.fmu | Private | Yes |
| Singlewatertank-20sim.fmu | Private | Yes | |
| Leak_detector.fmu | Private | No | |
| Leak_controller.fmu | Private | No | |
| Tool | maestro-2.3.0-jar-with-dependencies.jar | Common | Yes |
This DT has many configuration files. The DT is executed in two stages. There exist separate DT configuration files for each stage. The following table shows the configuration files and their purpose.
| Configuration file name | Execution Stage | Purpose |
|---|---|---|
| mm1. json | stage-1 | DT configuration |
| wt_fault.xml, FaultInject.mabl | stage-1 | faults injected into DT during stage-1 |
| mm2.json | stage-2 | DT configuration |
| simulation-config.json | Both stages | Configuration for specifying DT execution time and output logs |
Lifecycle Phases
| Lifecycle Phase | Completed Tasks |
|---|---|
| Create | Installs Java Development Kit for Maestro tool |
| Execute | Produces and stores output in data/water_tank_swap/output directory |
| Analyze | Process the co-simulation output and produce plots |
| Clean | Clears run logs, outputs and plots |
Run the example
To run the example, change the present directory.
If required, change the permission of files that need to be executed, for example:
Now, run the following scripts:
Create
Installs Open Java Development Kit 17 and pip dependencies. The matplotlib pip package is also installated.
Execute
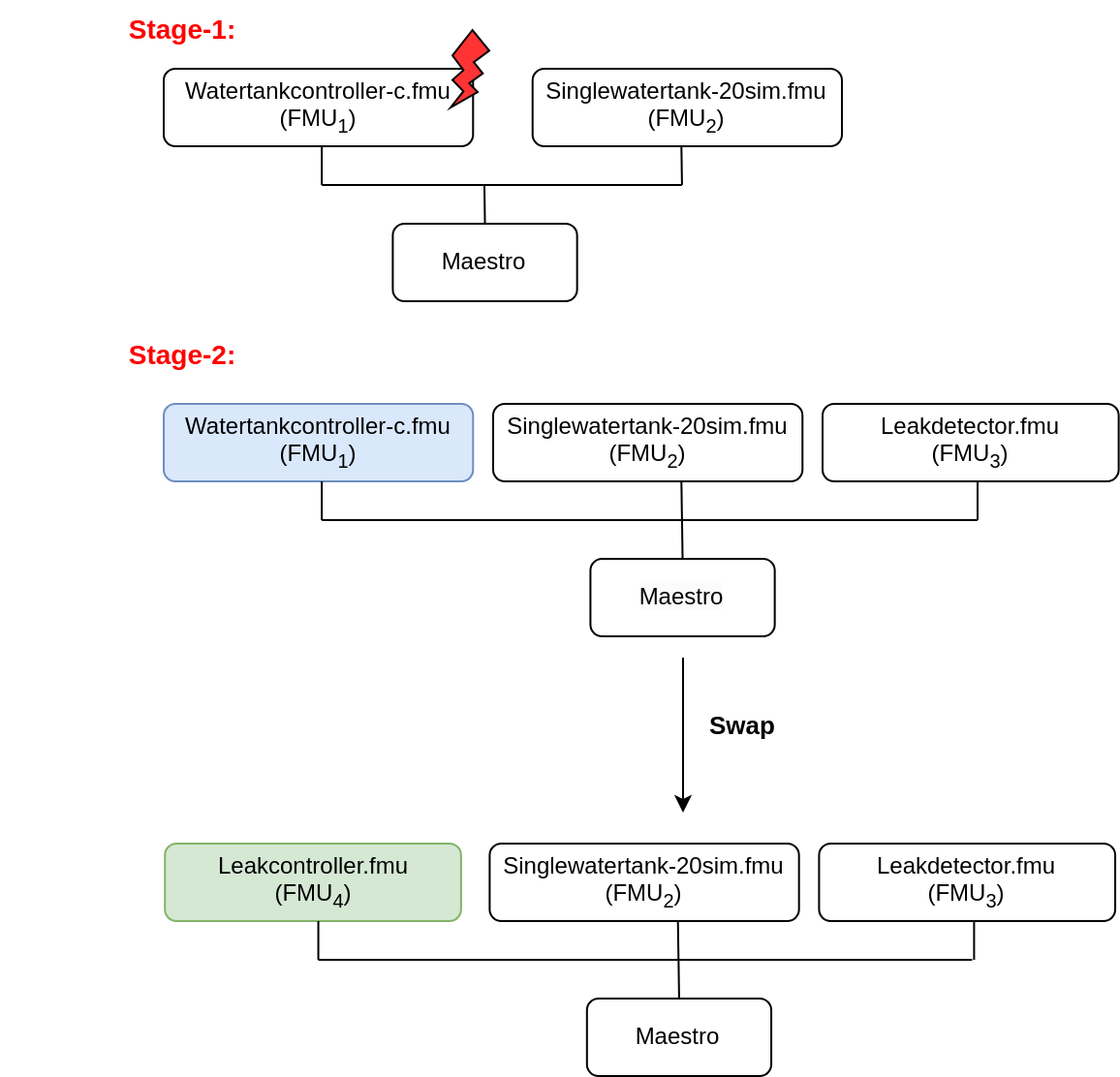
This DT has two-stage execution. In the first-stage, a co-simulation is executed. The Watertankcontroller-c.fmu and Singlewatertank-20sim.fmu models are used to execute the DT. During this stage, faults are injected into one of the models (Watertankcontroller-c.fmu) and the system performance is checked.
In the second-stage, another co-simulation is run in which three FMUs are used. The FMUs used are: watertankcontroller, singlewatertank-20sim, and leak_detector. There is an in-built monitor in the Maestro tool. This monitor is enabled during the stage and a swap condition is set at the beginning of the second-stage. When the swap condition is satisfied, the Maestro swaps out Watertankcontroller-c.fmu model and swaps in Leakcontroller.fmu model. This swapping of FMU models demonstrates the dynamic reconfiguration of a DT.
The end of execution phase generates the co-simulation output.csv file
at /workspace/examples/data/water_tank_swap/output.
Analyze phase
Process the output of co-simulation to produce a plot at:
/workspace/examples/data/water_tank_FI/output/plots/.
Examine the results
The results can be found in the workspace/examples/data/water_tank_swap/output directory.
Run logs can also be viewed in the workspace/examples/digital_twins/water_tank_swap.
Terminate phase
Clean up the temporary files and delete output plot
References
The complete source of this example is available on model swap github repository.
The runtime model (FMU) swap mechanism demonstrated by the experiment is detailed in the paper:
The runtime reconfiguration of co-simulation by modifying the Functional Mockup Units (FMUs) used is further detailed in the paper: